In Rienmannian geometry space can curve at different places (see manifolds) here we look at geometries where the curve of space is constant.
|
flat space |
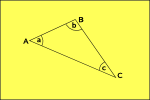 |
Hyperbolic Geometry space curves outward |
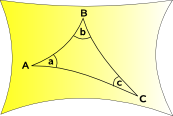 |
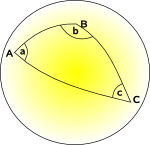
Spherical Geometry and Elliptic Geometry space curves inward |
 |
Terminology
Here we look at the terminology such as geometries, spaces, models, projections and transforms. Its quite difficult when we start dealing with non-Euclidean geometries because we use similar terminology that we are used to in conventional Euclidean space but the terms can have slightly different properties. For example, the concept of a 'line' can look different in different geometries:
Geometries and Spaces
Rienmannian geometry defines spaces generally in terms of manifolds, here we are interested in homogeneous, isotropic spaces which have no preferred points or directions, examples are:
| parallel postulate - number of unique parallel lines through point | space curves | Inventors | Point at Infinity | Distance Measure | |
|---|---|---|---|---|---|
| Eulidean Geometry | 1 | none | Euclid | where parallel lines meet | √(x² + y²) |
| Hyperbolic Geometry | ∞ | space curves outward so lines dont meet | Lobachevskii and Bolyai |
||
|
Elliptic Geometry |
0 | space curves inward so all lines meet |
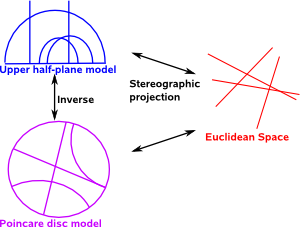
Models
Examples are:
- Upper half-plane model
- Poincare disc model
- Projective model
- Conformal model
Projections
Transforms
Invariant
Examples are:
- Möbius Transform
- Lorentz Transform
Parallel Postulate
If we take away the parallel postulate from Euclidean Space.
This leads to:
- parallel postulate is false
- the angles of a triangle do not add to π
- for a shape of a given size, there does not in general, exist a similar shape of a larger size.
Possible mappings between Euclidean Space and Hyperbolic Space:
properties:
| projective | conformal (Poincaré disc ) | |
|---|---|---|
| straight lines - geodesics | segments of circles | |
| angle | preserved | |
| internal angles of triangle | π-(α+β+γ)=CΔ | |
| distance between two points | ln | |
