There are two types of algebra associated with transformations and these algebras must interwork correctly together.
- The first type of algebra defines how a given point is transformed, that is, a given rotation must define where every point, before the rotation, ends up after the rotation.
- The second type of algebra defines how rotations can be combined, that is, we first do 'rotation 1' then we do 'rotation 2' this must be equivalent to some combined rotation, say: 'rotation 3'.
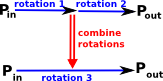 |
The diagram on the left tries to illustrate this.
|
Multiply Matrix by Vector
A matrix can convert a vector into another vector by multiplying it by a matrix as follows:
|
= |
|
|
| We can think of this as transforming |
|
into |
|
If we apply this to every point in the 3D space we can think of the matrix as transforming the whole vector field.
This can represent any linear transform, including scaling and rotation (translation can be done by adding vectors).
Applying the Transform
The result of this multiplication can be calculated by treating the vector as a n x 1 matrix, so in this case we multiply a 3x3 matrix by a 3x1 matrix we get:
|
= |
|
So any vector v_in can be converted into another vector v_out.
We can show all vectors as a vector field as shown here.
Scaling
We can scale using the following matrix:
| m00 | 0 | 0 |
| 0 | m11 | 0 |
| 0 | 0 | m22 |
If we want to scale equally in all dimensions then m00 =m11=m22
Translation
We can translate a vector by adding an offset vector, not a linear transform as shown above. Sometimes we want to combine translation with rotation so that we can do both in one operation, but we cant do 3D translation by multiplication with a 3x3 matrix . but we can with a 4x4 matrix as defined here.
Rotation
We can use a 3x3 matrix to represent rotation in 3 dimensions as defined here. Rotations in any arbitrary number of dimensions are discussed in group theory.
Sample 3D Rotations
In order to try to explain things I thought it might help to work out a simple case where rotations are only allowed in multiples of 90 degrees. This should make it easier to illustrate the orientation with a simple aeroplane figure, we can rotate this either about the x,y or z axis as shown here:
Properties of rotation matrix
Determinant of Rotation Matrix
det[R] = 1
The determinant (as defined on this page) is plus one (rotation combined with a reflection gives a determinant of minus one).
Eigenvector and Eigenvalues of Rotation Matrix
The eigenvector and eigenvalues (as defined on this page) can best be written in terms of the matrix when it is written in terms of the axis angle representation:
| [R] = |
|
where,
- c =cos(θ)
- s = sin(θ)
- t =1 - c
- x = normalised axis x coordinate
- y = normalised axis y coordinate
- z = normalised axis z coordinate
this gives:
eigenvalues = {1 , e±iθ} = {1 , cos(θ) ± i sin(θ)}
eigenvector = [x,y,z]
