I am very keen to have consistent standards of notation and terminology across this site. Its hard enough to learn these things without being confused by inconsistent standards. It may not be perfect yet so, if you find any inconsistencies across the site please let me know.
I have documented the maths notation on this page.
I have also tried to apply standards to the physics notation and terminology (see physics standards).
In some cases there are different ways to notate, calculate and display. Wherever possible I have tried to base these on standards, here are some standards used:
| This site | VRML/X3D (ISO/IEC 19775) | OpenGL | DirectX |
MathML |
|
| Vector shown as row or column | see D3DVECTOR structure | ||||
| Matrix order | opposite of everything else | see D3DMATRIX structure | |||
| Coordinate System | right-handed cartesian | right-handed cartesian | right-handed cartesian (for orthographic projection) | left-handed cartesian | |
| x,y and z definitions |
+X to the right |
+X to the right +Y straight up +Z axis toward viewer |
Orthographic Projection see glOrtho() Viewport |
+X to the right +Y straight up +Z axis into screen |
|
| Euler angles | Heading = rotation about y axis Attitude = rotation about z axis Bank = rotation about x axis |
||||
| Euler angle order | Heading applied first Attitude applied second Bank applied last |
||||
| Positive angle | right hand screw | right hand screw | right hand screw (see glRotated) | ||
| Angle units | radians | radians | degrees (see glRotated) | radians | |
| Vector Cross product | right hand: x = Ay * Bz - By * Az so, mechanics equations are, |
||||
Clifford Algebra: factor ordering |
dually | ||||
Clifford Algebra: element ordering |
grade-ordered |
I have tried to use established open standards rather than inventing my own wherever I can.
Where these standards conflict I have used VRML/X3D (ISO/IEC 19775) on this site. For Euler angles I have used NASA standard Aeroplane but I have swapped the y and z axis, to conform to x3d, so:
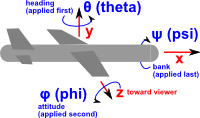 |
Heading applied first (rotation about y axis – which is up-down) Attitude applied second (rotation about z axis which is along wing) Bank applied last (rotation about x axis which is front-back) |
Although z and y are swapped: Heading, Attitude and Bank are applied in the same order so the properties of NASA standard Aeroplane are still the same, i.e. the singularity still happens at attitude= -+90 degrees.
I mentioned NASA standard Aeroplane (as its American I should have written NASA standard Airplane) . The problem is that I can't actually find this standard even from NASA employees that I have communicated with. The only information that I have about this standard is from a book: Analytical Dynamics (McGraw-Hill International Editions) and this is very limited information. Is unfortunate as a standard from such a source as NASA would be helpful.
